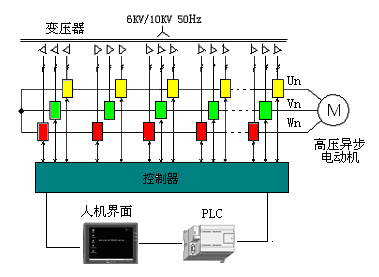
如图1所示,级联式高压变频器主回路由输入移相变压器、功率单元、主控系统及电气控制构成。电网输入为三相10kV或6kV,经过移相变压器变为n个低压、独立、移相二次绕组电源,依次接入功率单元模块,经过整流、滤波和逆变输出单相交流电源。若输入为6kV,则每相由5个最大输出电压为759V的功率单元串联而成,使输出的相电压最大值得到3795V,线电压最大输出为6572V,当变频器带满载时,除掉变压器压降和功率单元压降,则输出大约为最大输出的92%。移相变压器电流多重化作用可以降低电网侧电流谐波。5个二次绕组通过不同的联结方式使它们之间的电流相位差为12°,在变压器一次绕组侧构成30脉波整流电路,理论上可以消除电网侧29次以下谐波。
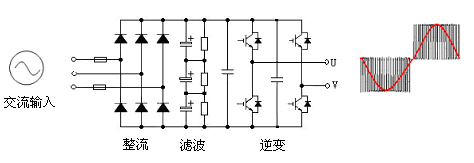
图2 功率单元基本结构图
采用功率单元串联,不存在器件均压的问题。每个功率单元承受全部输出电流,但仅承受1/5的输出相电压和1/15的输出功率。输入功率因数可达到0.95以上。这种主电路拓扑结构虽然使器件数量增加,但是由于IGBT驱动功率很低,且不必采用均压电路、吸收电路和输出滤波器,可使变频器的效率高达96%以上。
如图2所示,功率单元是由4个低压绝缘栅双极晶体管(IGBT)构成的低压PWM电压型逆变器。可输出1,0,-1三种状态电平;每相5个功率单元叠加,由于采用多重化SVPWM技术,可以产生11种不同的电平等级,可得到具有11级阶梯电平的相电压波形和21级阶梯电平的线电压波形。使得输出波形接近正弦波,输出谐波小。
6KV每相5个单元级联多电平变频器电压叠加原理(以其中一相如A相为例)如下图所示:
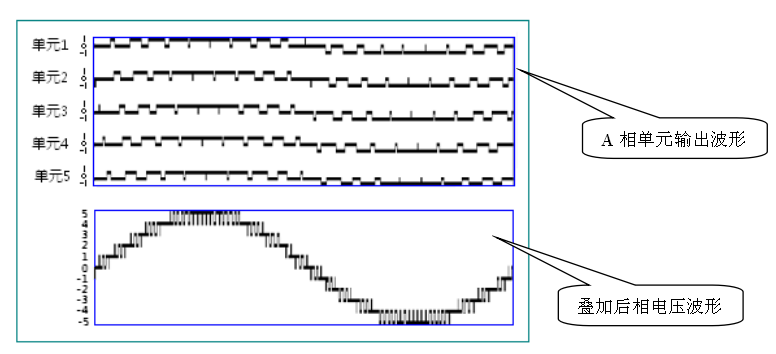
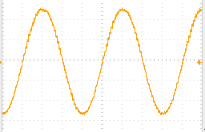
图3 串联多电平变频器相电压波形图
每相单元输出波形的电平数为11个阶梯波。
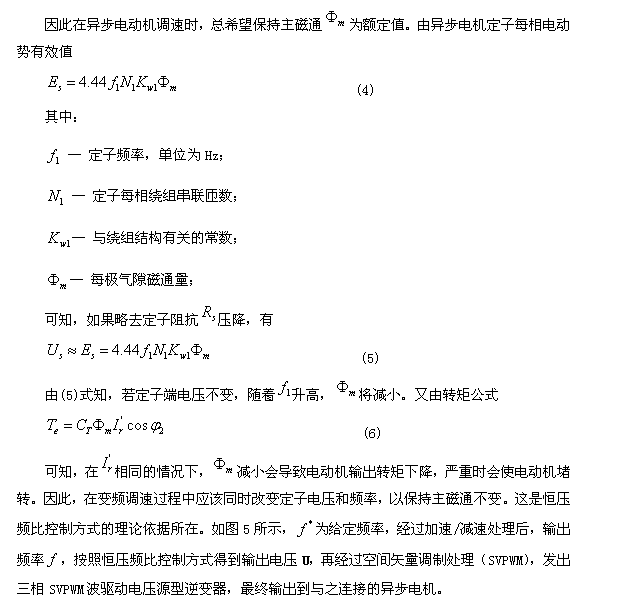
如图6所示,给出了多电机拖动皮带输送机的恒压频比控制系统的原理图,图中所示的交流异步电动机用于驱使皮带输送机的运行,所有电动机的规格相同;每台交流异步电动机均由一台变频器对其进行驱动。所有变频器中有且只有一台为主机变频器,其余的为从机变频器,主机变频器用于实现与上位机的通信。变频器的电源输入端与电网相连接,电源输出端与相应电动机的定子输入端相连接;主机变频器与所有从机变频器之间通过光纤相通信,同时主从机变频器通过检测相应输出的有功电流大小来对运行频率做调整,以达到各个电机的功率平衡目的。
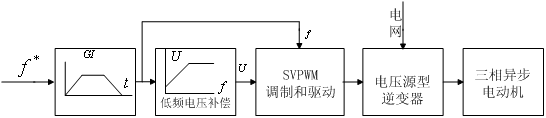
图6中所示的变频器为电压源型级联式高压变频器。多电机拖动皮带输送机控制系统采用恒压频比控制方式,根据预先设定的VF曲线向多电机拖动皮带输送机系统中的电机的定子绕组施加电压,其特性可以等效于稳定的交流电压源,其稳定性最接近于工频电网,因而与其它控制方式和其它类型的变频器相比,具有更高的工作稳定性和可靠性。同时,由于多电机拖动皮带机系统中的各个电机的无功电流仅在电机的定子绕组和变频器之间流动,不进入工频电网,因此减小了对电网容量的要求,提高了系统的输入功率因数。
图6中主从变频器通过各自电流传感器采集三相输出电流Ia、Ib、Ic,然后将静止坐标系的电流Ia、Ib、Ic变换成α和β两相静止坐标系(Clarke变换),也叫3/2变换,再从两相静止坐标系变换成同步旋转磁场定向坐标系(Park变换),变换的同步角度为变频器输出的电压矢量角度,这样就得到了等效成同步旋转坐标系下的直流电流Iq、Id。其中Id为异步电机的励磁电流,也就是乐鱼所说的无功电流,一般为电机额定电流的30%,Iq为与转矩成正比的电枢电流,也就是乐鱼所说的有功电流。通过控制有功电流大小来实现对变频器输出有功功率的控制,最终实现各个电动机输出扭矩一致、功率平衡。
2.4 具体实施方法
恒压频比控制型多机拖动皮带机变频器采用主从控制方式,系统中的每台电机都分别有一台变频器驱动,驱动异步电动机的变频器有主从之分,在整个系统中有且只有一台变频器主机,其它的变频器都作为从机。针对多电机拖动皮带输送机变频启动、停机、运行调节和故障保护等关键性问题,提出了一种使用恒压频比控制型变频器驱动多电机拖动皮带输送机运行的方法,使恒压频比控制型变频器驱动多电机拖动皮带输送机变频调速运行成为可能。
本文所涉及的多电机拖动皮带输送机的恒压频比控制系统的控制方法,包括启动过程、运行过程和停机过程,如图7和图8所示,分别给出了本控制方法中主机变频器和从机变频器的程序流程图;
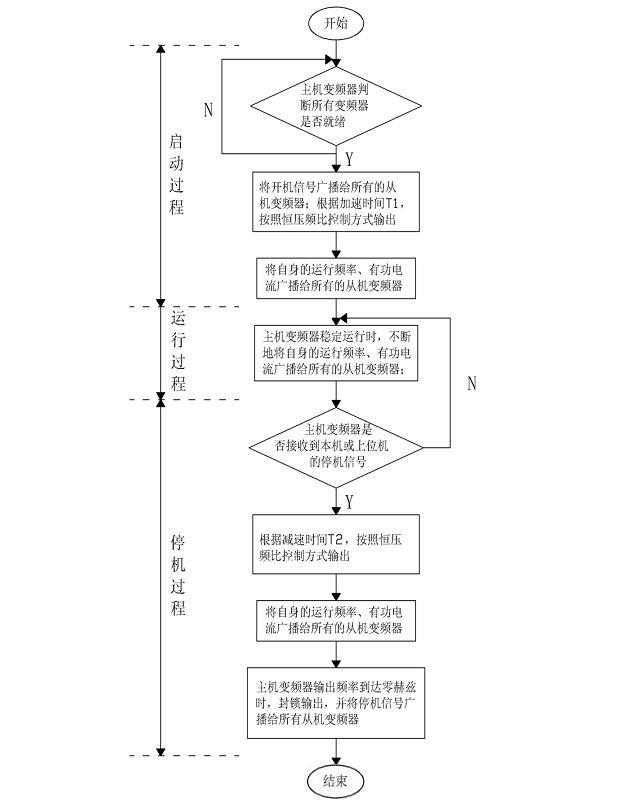
图7 主机变频器的程序流程图
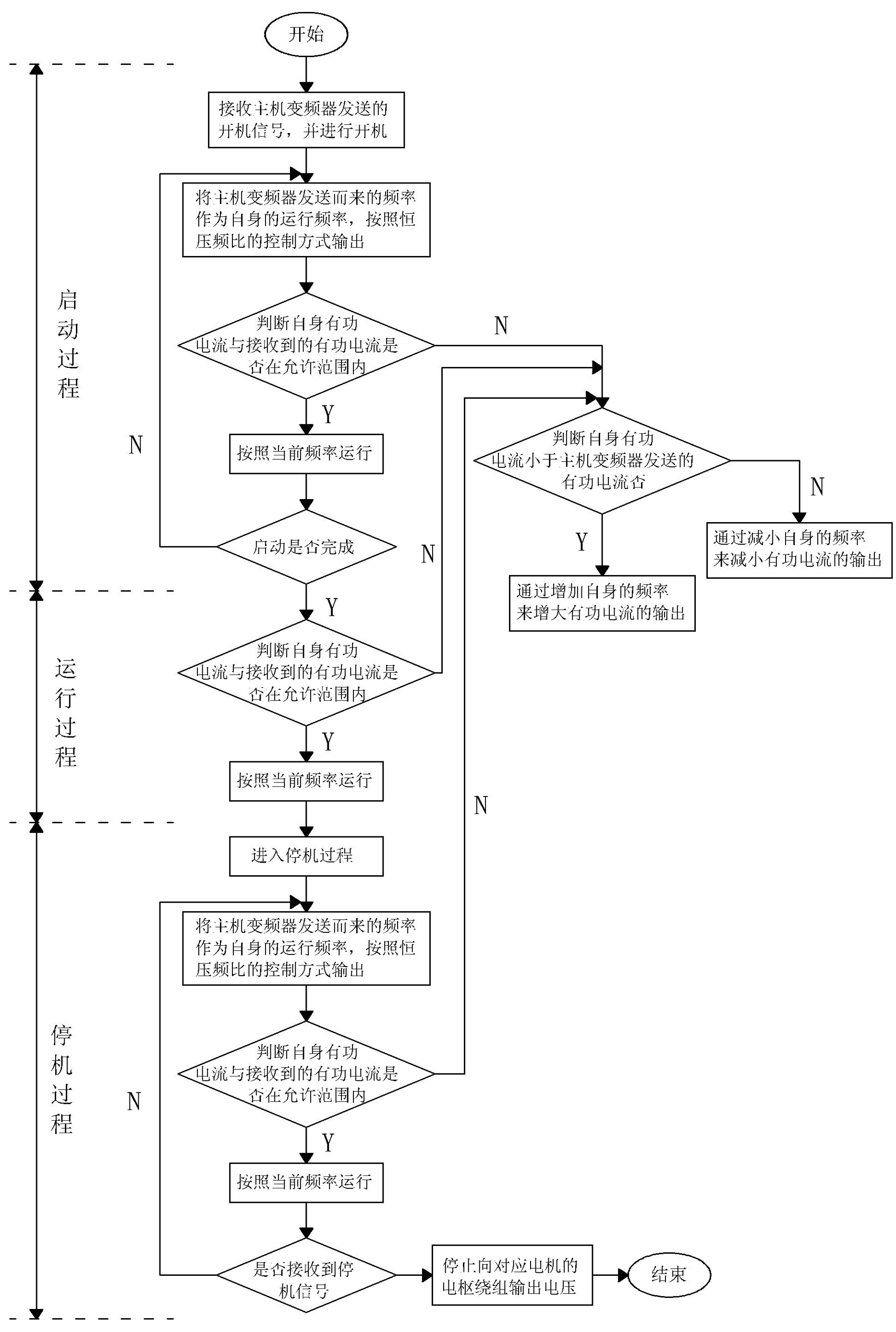
图8 从机变频器的程序流程图
该控制思想的特点是:能够使用恒压频比控制型变频器驱动多机拖动皮带输送机平稳地启动、停机、以较高的效率变频运行;在出现紧急情况下,可靠地保护电机、变频器。拓展了恒压频比控制型变频器的应用范围,增加了多机拖动皮带输送机变频器调速系统的选择范围,也降低了多机拖动皮带输送机变频改造的成本。由于本方法使用恒压频比开环控制方式,无需速度位置传感器,无需检测电机参数,因而提高了电机运行的可靠性和稳定性,降低了系统的故障率。
3 实验验证
上述的技术方案经过产品化后验证整个设计方案是可行的并在不同的现场设备上进行了技术测试和考核。
如在山西省某洗煤厂,双机拖动皮带输送机系统中,每台电机的额定功率为560kW,额定电压为10kV,每台电机均由单独的变频器驱动。控制方案采用本文所论述的方案,皮带机系统能够平稳地启动、停机、以较高的效率变频运行。其基本运行参数如下表所示,
表1 主从变频器运行参数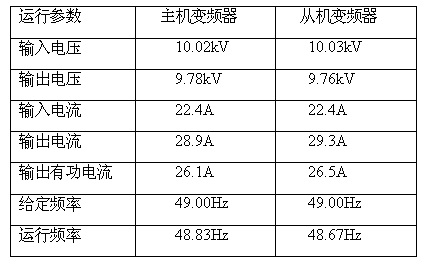
从上表中可看出,两台变频器输出频率分别为48.83Hz、48.67Hz,输出电流分别为28.9A、29.3A,输出有功电流分别为26.1A、26.5A,运行频率与运行电流基本相同。这保证了电机的运行功率平衡,有助于皮带输送机系统的长时间运行。
4 结束语
本文详细地叙述了变频器构成及原理,变频器调速与恒压频比控制原理,以及如何采用恒压频比变频器驱动控制多机拖动皮带机系统,对恒压频比控制方式、主从控制方式原理做了详细的阐述,对多机拖动皮带输送机的启动、停机、稳定运行过程做了具体说明。这种控制方法的变频器在实际的多机拖动皮带输送机系统中通过了试验验证。


 旧站回顾过去
旧站回顾过去 【留意微信qq】
【留意微信qq】 【扫码支付访站】
【扫码支付访站】